サーボモーターを使った装置設計で忘れてはいけないのが「減速機の選定」です。
「とりあえずギヤつけとけばいいでしょ?」と思って適当に選ぶと、
✔ トルク不足で動かない
✔ 精度が出ない
✔ 異音や振動が発生
✔ 寿命が短くなる
といったトラブルの原因になります。
この記事では、サーボモーター用減速機の選定に必要な知識・
計算方法・選定の流れ・注意点を、初心者でもわかるように丁寧に解説します。
減速機とは?なぜ必要?
減速機(ギアヘッド)は、モーターの出力回転を
減速しつつトルクを増やす装置です。
特にサーボモーターは高速・低トルクな傾向があるため、
そのままでは負荷を駆動できない場合が多く、
減速機が必要になります。
減速機の主な役割
減速機の種類(サーボ用)
| 種類 | 特徴 | 用途例 |
|---|---|---|
| 遊星ギア(プラネタリギア) | 高トルク・高精度・コンパクト | ロボット・搬送装置など |
| 傘歯車(ベベルギア) | 入出力角度が90度可能 | スペース制限のある機構 |
| ハーモニックドライブ | 極高精度・バックラッシゼロ近く | ロボット関節・半導体装置 |
| サイクロイド減速機 | 耐衝撃性・高トルク | ロボットアーム・工作機械 |
中でも遊星ギア型減速機は、サーボモーターとの相性が良く、よく使われます。
減速機選定の流れ
減速比の設定
モーターの回転数と負荷の要求速度から、
必要な減速比(ギア比)を決めます。
減速比 = モーター回転数 ÷ 負荷の回転数
🔍 例)
モーター定格3000rpm、負荷側要求100rpm → 減速比 = 30:1
推奨:20~50の範囲で収めるとトルクと分解能のバランスが良い
トルク計算
負荷トルクを減速比でモーター側に換算し、
モーター出力トルクとのバランスを見ます。
必要減速後トルク = 負荷トルク × 安全率(通常1.5~2.0倍)
🔍 例)
負荷トルク2Nm、減速比20 → 減速機出力側で40Nm必要
→ 減速機が40Nm以上に耐えられる必要あり
入力回転数の確認
減速機には許容される「最大入力回転数」があります。
サーボモーターは高回転が多いので、許容を超えないかチェック必須!
バックラッシ(遊び)の確認
バックラッシとは、回転方向を変えたときの機械的なガタつき量。
高精度な位置決めをしたい場合は、
- バックラッシ:3分以下(0.05°程度) を目安に選定しましょう。
寸法・取付互換性
- サーボモーターと減速機のフランジ寸法・軸径が合うか
- メーカーが「サーボ取付専用アダプター」を用意しているか
✅ ニッセイや住友重機械などでは、サーボとの組合せ情報がWEBで公開されています
ライフサイクル(寿命)評価
- 減速機は定格トルク・寿命(h)がカタログに記載されている
- 装置の使用頻度や1日の稼働時間を元に、寿命内か確認しましょう
設計上の注意点・よくある落とし穴
減速比を大きくしすぎない
大きい比率(例:100:1)は分解能は良くなりますが、
- 出力軸の反応が遅くなる
- 摩擦やイナーシャ比の影響が大きくなる
✅ イナーシャ比(負荷/モーター)を100以下にするのが一般的な目安
過負荷トルクに注意!
- 装置が頻繁に急停止・急加速をする場合、瞬間的なトルクが定格の3倍以上になることも。
- 減速機の仕様はピークトルク(最大耐久トルク)も確認しましょう。
メンテナンス性を確認!
グリス封入型の遊星減速機などはメンテナンスフリーで扱いやすいですが、
開放型やオイル潤滑型では定期交換・密閉性の管理が必要になります。
サーボモーターの回転速度は何%で使うのがベスト?
~定格回転速度との関係をわかりやすく解説~
サーボモーターを使ううえで、
「どれくらいの回転速度で運用するのが最適なの?」という疑問をよく聞きます。
特に設計初心者が見落としがちなのが
「定格回転速度と実際の使用回転数とのバランス」です。
本項ではこのポイントをしっかり解説していきます!
定格回転速度とは?
まず前提として、定格回転速度とは、
メーカーが「長時間・安定して運転できる」と保証している回転速度
のことです。
この速度であれば、発熱や負荷、寿命の面でも問題なく使用できます。
実際の運用は何%くらいがベスト?
多くの現場やメーカーカタログでは、定格回転速度の60~80%程度で運用するのが最適とされています。
| 運用速度 | 特徴 |
|---|---|
| 60~80% | 摩耗・発熱が少なく、効率的で安定した運用が可能 |
| 90~100% | 高速応答性はあるが、連続運転だと発熱リスクが増す |
| 100%以上(最大速度域) | 非常用、瞬間動作に限定。連続運転には向かない |
なぜ100%運用がよくないの?
発熱と寿命の問題
100%運転(定格ぴったり or それ以上)では、
以下のリスクが上がります。
サーボモーターは熱に非常に弱い部品です。
定格ギリギリで使い続けると、
設計寿命より早くトラブルになることも。
安定した制御がしづらい
定格回転数ギリギリやそれ以上になると、モーターの制御性能も落ちやすくなります。
わずかな負荷変動で速度がぶれたり、トルク不足が出やすくなったりします。
設計のポイント:なぜ80%以下で設計するのか?
サーボモーターは設計上、ある程度の「余裕」をもって使うのが基本です。
例:定格回転数が3000rpmの場合
✅ 運用目安:1800~2400rpm(=60~80%)
✅ この範囲であれば、トルクにも余裕があり、発熱も穏やか
✅ 異常時やオーバーシュートにも耐性があり、安定性が高い
よくある質問
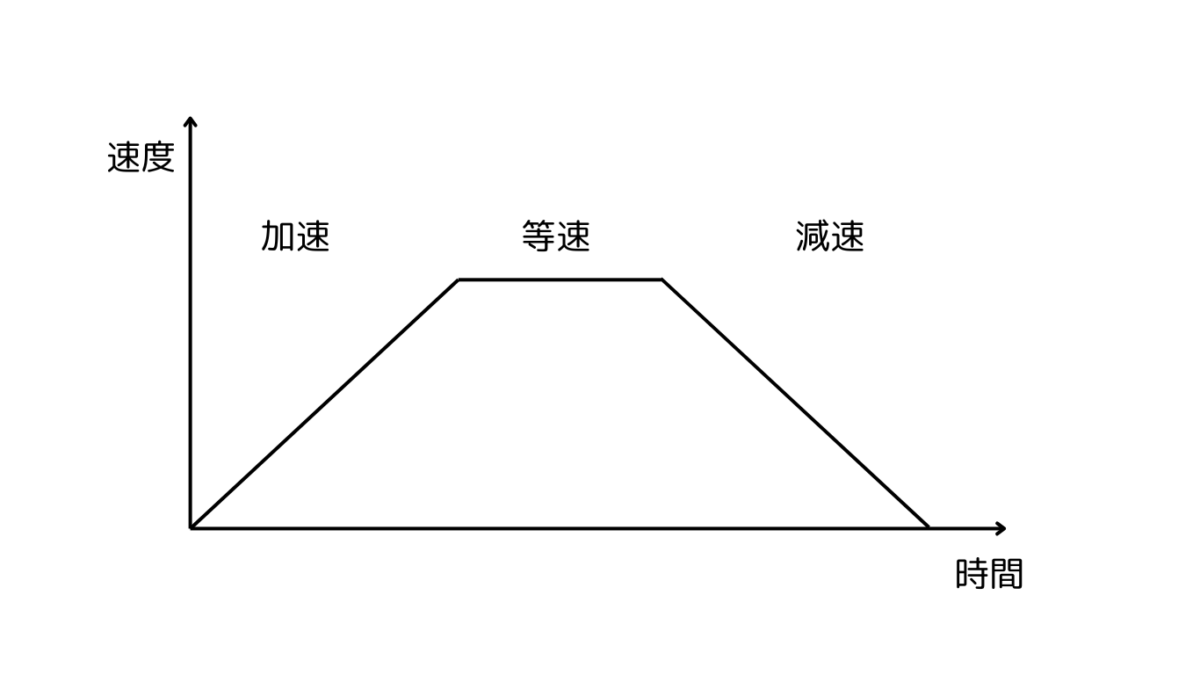
Q. 短時間なら定格回転数以上でもOK?
瞬間的な速度(例:6000rpm)まで加速することはありますが、
「連続運転」は避けるべきです。
最大回転速度はあくまで「瞬間運転が可能な上限」です。
| ポイント | 内容 |
|---|---|
| 定格回転速度とは? | 長時間安全に使える速度(メーカー保証範囲) |
| 最適な運用速度は? | 定格の60~80%がおすすめ |
| 100%運転は? | 発熱・制御・寿命の面でリスクが高くなる |
| 設計では? | 余裕を持たせて「安全・安定」な運用を意識しよう |
速度よりトルクが重要なケースも!
用途によっては速度よりも「立ち上がりのトルク」や
「位置決め精度」が重要な場合もあります。
そのときは、速度の余裕だけでなく
dcdトルク特性や慣性比にも注目しましょう。
推奨する設計の考え方
まとめ
| 項目 | 選定ポイント |
|---|---|
| 減速比 | 負荷速度から決定(20〜50倍推奨) |
| トルク | 定格トルク × 安全率(1.5~2倍)で余裕を見る |
| 入力回転数 | サーボの最大回転に耐えるか確認 |
| バックラッシ | 高精度なら3分以下を目安に |
| 寸法 | モーターとの取付互換性を確認 |
| 寿命 | 装置の使用条件に対して問題ないか |
減速機は「動力伝達の最終段階」ですが、
装置性能に与える影響は非常に大きい要素です。
性能・寿命・精度・トラブルリスクを左右するので、
ぜひこの記事を参考にして、適切な選定をしてみてください!















コメント