機械設計において、電動機器の位置検出には
エンコーダが重要な役割を果たします。
特に、エンコーダには大きく分けて
インクリメンタル(増分式) と アブソリュート(絶対値式) の
2種類があり、それぞれ特性や用途が異なります。
本記事では、この インクリメンタルエンコーダと
アブソリュートエンコーダの違い や、
それぞれのメリット・デメリット、適用例、
選定ポイント について詳しく解説します。
インクリメンタルとアブソリュートの基本的な違い
| 項目 | インクリメンタルエンコーダ | アブソリュートエンコーダ |
|---|---|---|
| 方式 | 相対的な位置変化を検出 | 絶対的な位置を検出 |
| 電源OFF時の位置情報 | 電源OFFでゼロにリセット | 電源OFFでも位置情報を保持 |
| 原点復帰 | 必要(電源ON時に初期化) | 不要(常に絶対位置を保持) |
| 構造 | 比較的シンプルで安価 | 構造が複雑で高価 |
| 適用例 | 速度制御、回転方向検出 | 位置決めが必要な精密機械 |
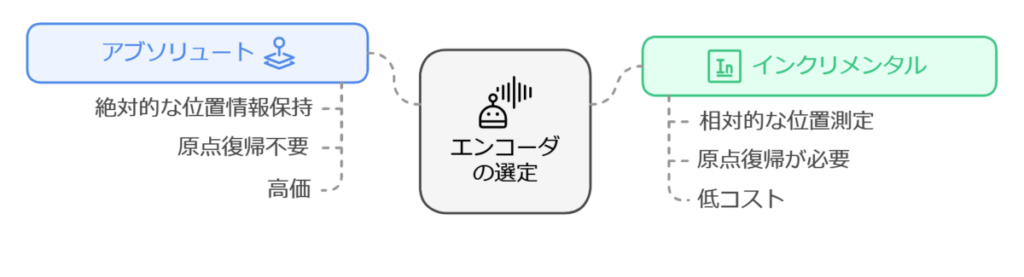
インクリメンタルエンコーダは、
単純な速度検出や回転方向の検出に向いており、
コストが低く取り扱いやすいです。
一方、アブソリュートエンコーダは、
電源が切れても位置情報を保持 できるため、
精密な位置決めが求められるシステムに適しています。
インクリメンタルエンコーダとは?
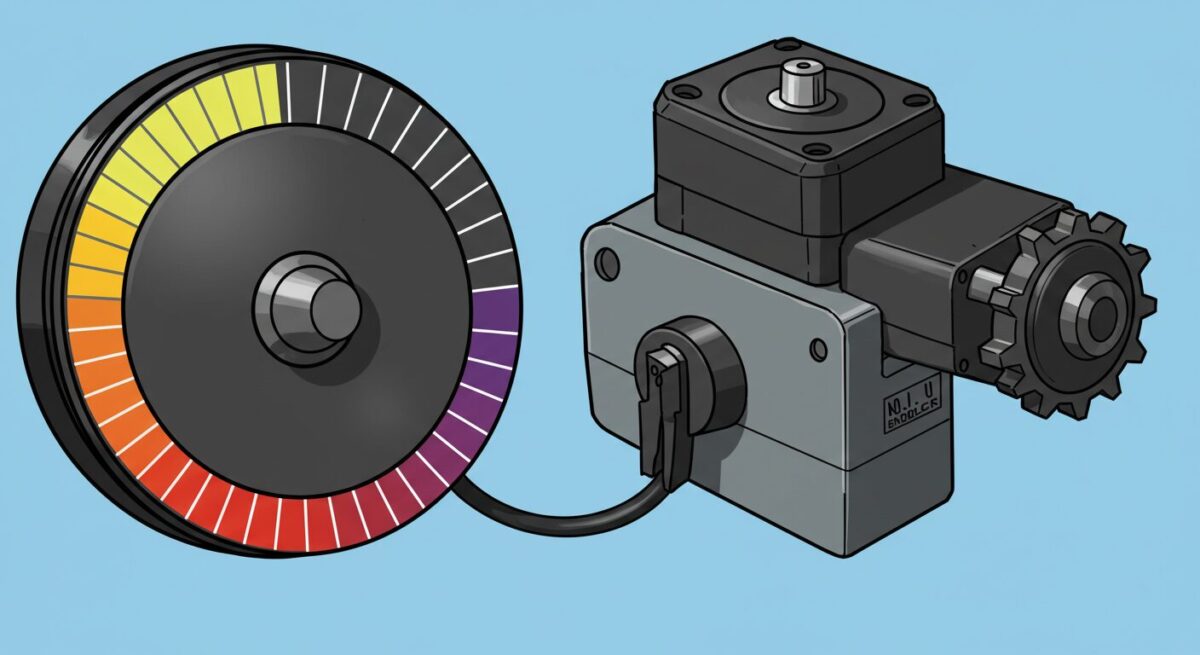
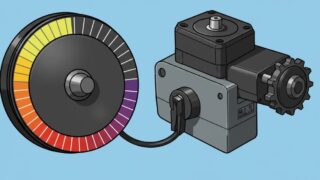
インクリメンタルエンコーダの動作原理
インクリメンタルエンコーダは、
回転や移動距離を相対的に測定するエンコーダです。
エンコーダのディスクには等間隔にスリットが刻まれており、
それをセンサで読み取ることで、回転量や移動距離をカウント します。
メリット・デメリット
✅ メリット
❌ デメリット
インクリメンタルエンコーダの適用例
アブソリュートエンコーダとは?
アブソリュートエンコーダの動作原理
アブソリュートエンコーダは、
エンコーダ内部に各角度ごとの固有コード(絶対値) を持っており、
電源が切れても位置情報を保持 できます。
これにより、電源再投入後でも原点復帰を行わずに、
現在の位置を正確に把握することが可能です。
メリット・デメリット
✅ メリット
❌ デメリット
アブソリュートエンコーダの適用例
インクリメンタルとアブソリュートの選定ポイント
どちらを選ぶべきか?
| 用途 | 推奨エンコーダ |
|---|---|
| 速度・回転方向の検出 | インクリメンタル |
| 電源ON/OFF時の位置保持が不要 | インクリメンタル |
| 高精度な位置決めが必要 | アブソリュート |
| 電源断後も位置情報を保持したい | アブソリュート |
| 高コストが許容できる | アブソリュート |
コスト vs 精度のバランス
もしシステムの精度要求が厳しく、
原点復帰の手間を省きたい場合は アブソリュート を選びます。
一方で、単純な速度制御や回転方向検出で十分な場合は
インクリメンタル の方がコストメリットが大きくなります。
バッテリーレスアブソリュートとは? 特性と選定ポイントを詳しく解説!
機械設計において、位置決め や モーター制御 に不可欠なエンコーダ。
その中でも、電源を切っても位置情報を保持できる
アブソリュートエンコーダ は、多くの産業機械やロボットに採用されています。
しかし、従来のアブソリュートエンコーダには
バッテリーが必要 という課題がありました。
そこで登場したのが バッテリーレスアブソリュートエンコーダ です。
本項では、このバッテリーレスアブソリュートの特性、
仕組み、メリット・デメリット、選定ポイント について詳しく解説します。
バッテリーレスアブソリュートエンコーダとは?
バッテリーレスアブソリュートエンコーダ とは、
従来のアブソリュートエンコーダのように
バッテリーを使わずに絶対位置を記憶できるエンコーダ のことです。
通常のアブソリュートエンコーダでは、電源を切っても位置情報を保持するために
バッテリーを搭載 しており、定期的な交換やメンテナンスが必要でした。
一方、バッテリーレスアブソリュートは、
磁気式や機械式 などの技術を活用し、
バッテリーなしで位置情報を記憶できます。
バッテリーレスアブソリュートの仕組み
バッテリーレスアブソリュートエンコーダには、
主に 磁気式(マルチターン方式) や 機械式 などの技術が用いられます。
磁気式バッテリーレスアブソリュートの仕組みと特性
磁気式バッテリーレスアブソリュートエンコーダは、
磁気センサーとマルチターンカウンターを使用して回転数を記録します。
🔹 仕組み
✅ メリット
❌ デメリット
機械式バッテリーレスアブソリュートの仕組みと特性
機械式バッテリーレスアブソリュートエンコーダは、
ギアメカニズムを活用して回転数を記録します。
🔹 仕組み
✅ メリット
❌ デメリット
磁気式 vs. 機械式の選定ポイント
| 選定基準 | 磁気式 | 機械式 |
|---|---|---|
| コンパクトさ | ✅ 優れている | ❌ 大型になりやすい |
| 耐衝撃・耐振動性 | ✅ 高い | ❌ ギアの摩耗が発生 |
| 磁場の影響 | ❌ 受けやすい | ✅ 影響なし |
| 長期間のデータ保持 | ❌ 限界あり | ✅ 半永久的に保持 |
| 高速回転への適応 | ✅ 高速でも精度維持 | ❌ ギアの慣性が影響 |
| コスト | ❌ 高め | ✅ 比較的安価 |
バッテリーレスアブソリュートのメリット・デメリット
✅ メリット
- バッテリー管理が不要
- 定期的なバッテリー交換やメンテナンスが不要になり、
長期的な運用コストが削減できる。
- 定期的なバッテリー交換やメンテナンスが不要になり、
- 環境負荷が少ない
- バッテリー廃棄が不要になり、環境に優しい。
- コンパクト設計が可能
- バッテリーを搭載しない分、装置の小型化が可能。
- 高温・低温環境に強い
- バッテリーを使用しないため、温度変化による劣化リスクが少ない。
- メンテナンスフリー
- バッテリー切れによるダウンタイムを防ぎ、設備の稼働率が向上する。
❌ デメリット
- 初期コストが高い
- 従来のアブソリュートエンコーダに比べて、
磁気センサーや回生技術を搭載するため価格が高め。
- 従来のアブソリュートエンコーダに比べて、
- 急停止や長期間停止時のデータ保持に注意
- 一部の方式では、
長期間動作しない場合にデータ保持が難しいことがある。
- 一部の方式では、
- 特定の動作環境で制約がある
- 強い磁場の影響を受けやすい場合があるため、
用途に応じた検討が必要。
- 強い磁場の影響を受けやすい場合があるため、
バッテリーレスアブソリュートの活用例
✅ 工作機械(CNC、マシニングセンタ)
高精度な位置決めが必要で、
頻繁なバッテリー交換が難しい環境に最適。
✅ 産業用ロボット(AGV、自動搬送機)
省メンテナンスで長時間稼働が求められる装置に適している。
✅ 医療機器(手術支援ロボット)
バッテリー交換が困難な機器で、長期的な安定性を確保できる。
✅ 発電プラント・エネルギー設備
高温・低温環境でも安定稼働が可能。
バッテリーレスアブソリュートは、
バッテリーなしで絶対位置を記憶できる次世代のエンコーダ。
磁気式(マルチターン方式)や回生電力方式により、長期間の運用が可能。
バッテリー交換不要、環境に優しい、メンテナンスフリーといった大きなメリットがある。
高精度な工作機械やロボット、医療機器など、幅広い分野で活用されている。
近年、IoTや自動化が進む中で、バッテリーレスアブソリュートは
今後さらに普及 していくことが予想されます。
選定の際は、用途に応じた方式を検討し、最適なエンコーダを選びましょう!
まとめ
インクリメンタルエンコーダ
→ 相対的な位置測定 を行うエンコーダ。
原点復帰が必要 だが、低コストで高速応答 に適している。
アブソリュートエンコーダ
→ 絶対的な位置情報を保持 できるため、
原点復帰不要で高精度な位置決め が可能。
だが、高価で構造が複雑。
⚙️ 選定ポイント
▶ 速度・回転方向の検出なら インクリメンタルエンコーダ
▶ 高精度な位置決めが必要なら アブソリュートエンコーダ
電動機器の設計において、用途に適したエンコーダを選定することが、
最適な機械性能を引き出す鍵となります。
この記事を参考に、設計に合ったエンコーダを選定してください!














コメント