サーボモーターは、位置、速度、トルクを
精密に制御するために使用されるモーターであり、
ロボット工学、自動化機器、工作機械などの
分野で非常に重要な役割を果たしています。
本記事では、サーボモーターの特性と
機械設計における選定ポイントについて詳しく解説します。
サーボモーターの特性
サーボモーターの構造
サーボモーターは通常、モーター、エンコーダ、
および制御装置(サーボアンプ)で構成されています。
この構造により、目標とする位置や速度を
フィードバック制御によって正確に制御することが可能です。
サーボシステムは、出力軸の位置や速度を計測し、
それを基にしてモーターに適切な指示を出します。
サーボモーターの動作原理
サーボモーターは、制御信号に基づいて回転角度や速度を制御します。
通常、制御信号はパルス幅変調(PWM)信号として供給され、
モーターが目標の位置または速度に到達するまで動作します。
この過程で、エンコーダやポテンショメーターが現在の位置を監視し、
差異があればその都度モーターの回転を調整します。
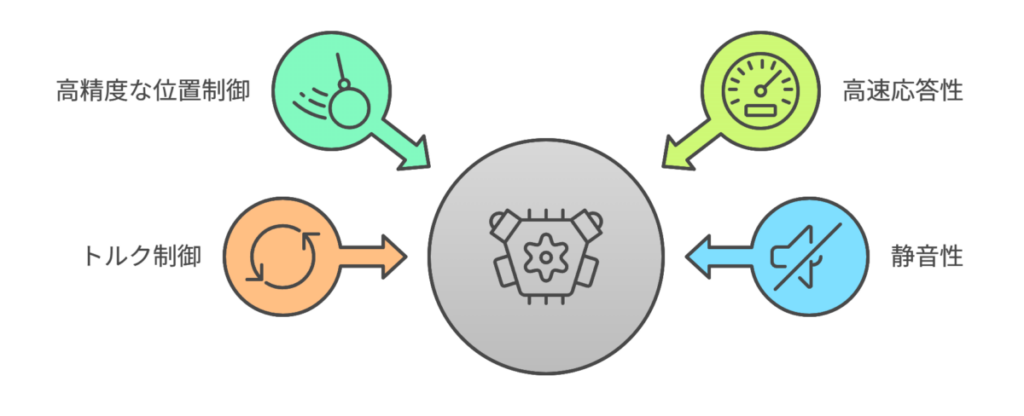
サーボモーターの特性
- 高精度な位置制御
- サーボモーターは、フィードバック機構により
正確な位置制御が可能です。 - 細かな精度で軸の位置を制御することができるため、
工作機械やロボットのアーム制御などに適しています。
- サーボモーターは、フィードバック機構により
- 高速応答性
- サーボモーターは応答速度が非常に速く、
短時間で目標の位置や速度に到達できます。 - これにより、高速で動作する
機械においても精度を保つことができます。
- サーボモーターは応答速度が非常に速く、
- トルク制御
- サーボモーターは、トルクを正確に制御できるため、
過負荷時に適切なトルク制御を行い、
モーターや機械を保護することができます。
- サーボモーターは、トルクを正確に制御できるため、
- 静音性
- サーボモーターは動作音が小さく、
特に低速で動作する際に静音性が求められる装置に適しています。
- サーボモーターは動作音が小さく、
サーボモーターの種類
サーボモーターにはいくつかの種類があり、用途に応じて適切なものを選定する必要があります。
サーボモーターの制御の仕組み
~位置や速度を思い通りに動かす技術~
サーボモーターは、位置・速度・トルクを
高精度でコントロールできるモーターです。
普通のモーターが「回すだけ」なのに対し、サーボモーターは
「決められた位置や速度まで正確に動かす」ことができます。
ロボット、工作機械、カメラのレンズ制御など、
精密な動きが必要な場面で使われます。
制御の基本は「フィードバック」
サーボモーターの特徴は、
常に自分の動きを確認しながら動くことです。
これを「フィードバック制御」といいます。
制御の流れ
サーボモーターの動きは、以下の3つの要素で成り立っています。
① 指令(コントローラーからの指示)
コントローラー(制御装置)から
「○度回転しろ」「○mm動け」などの命令が送られます。
これはいわば「目標の動き(目標値)」です。
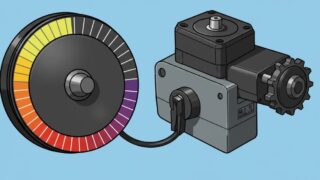
② 実際の動きを測定(センサー)
サーボモーターにはエンコーダという
回転位置センサーが付いています。
モーターが「今どこまで動いたか」をリアルタイムで検出します。
③ 比較と修正(ドライバ)
エンコーダから得た「実際の位置」と「目標位置」を比較します。
差(誤差)があれば、その分だけ
回転を速くしたり遅くしたりして補正します。
例え話で理解
サーボモーターは、車の運転でいうと
カーナビを見ながら運転する人のようなものです。
この「目標と現在位置を比べて修正する」動きが、
サーボ制御の本質です。
サーボモーター制御のメリット
サーボモーターは、
1.目標を受け取る(コントローラー)
2.現在位置を確認する(エンコーダ)
3.誤差を修正する(ドライバ)
というフィードバック制御で、位置や速度を正確に動かします。
そのため、精密機器やロボットのような
「正確さ」が求められる分野で活躍します。
サーボモーターの選定ポイント
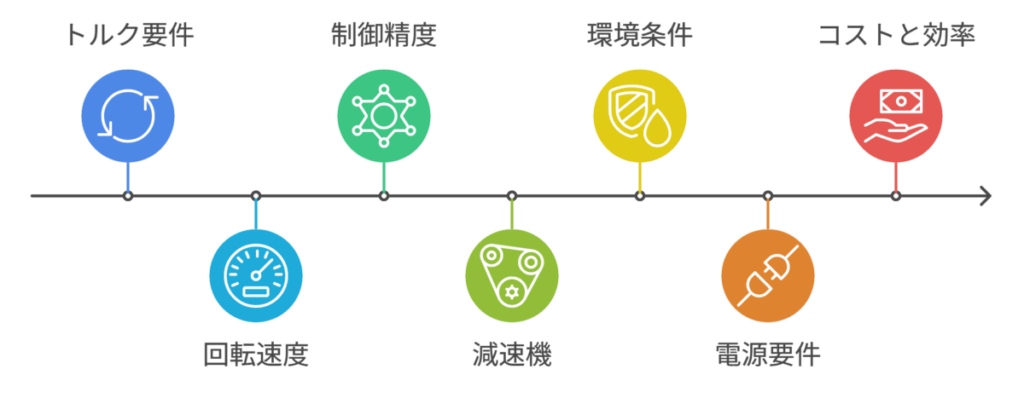
必要なトルク
サーボモーターを選定する際、最も重要な要素の一つがトルクです。
機械にかかる負荷や必要な加速・減速を考慮し、
適切なトルクを持つモーターを選定します。
モーターが提供するトルクは、
機械の重量、摩擦、加速度に基づいて計算する必要があります。
回転速度
サーボモーターの回転速度は、負荷の動きに応じて選定します。
低速で高精度の位置制御が必要な場合や、
高速での動作が必要な場合、
それぞれに適したモーターを選定することが重要です。
制御精度
サーボモーターの最大の特徴である制御精度は、特に重要です。
設計する機械の要求する精度に基づいて、
適切なフィードバック機構(エンコーダなど)を備えた
モーターを選定する必要があります。
減速機の選定
減速機(ギアヘッド)は、モーターの出力回転を
減速しつつトルクを増やす装置です。
特にサーボモーターは高速・低トルクな傾向があるため、
そのままでは負荷を駆動できない場合が多く、減速機が必要になります。
動作環境
サーボモーターが使用される環境条件も選定時に考慮するべきポイントです。
高温、多湿、粉塵の多い場所で使用される場合には、
防塵・防水性能を持ったモーターを選定することが必要です。
✅ 防塵・防水
IP規格に基づき、必要な防護性能を持つモーターを選びます。
✅ 温度耐性
高温や低温で使用する場合、モーターの温度耐性や冷却機構を考慮します。
電源条件
サーボモーターにはDCタイプとACタイプがあります。
設計する機械の電源仕様に基づいて、
どちらのタイプを選ぶかが決まります。
一般的に、ACサーボモーターは
高トルク・高出力を求める産業用途に適しています。
コストと効率
サーボモーターは高精度な制御が可能な一方で、
コストが高くなる傾向があります。
そのため、用途や要求精度に応じて
コストと効率のバランスを取ることが重要です。
主なメーカー
三菱電機株式会社 メーカーページはこちら
株式会社キーエンス メーカーページはこちら
まとめ
サーボモーターは、その高精度な位置制御、高速応答性、トルク制御により、
機械設計において多くの場面で必要不可欠な要素です。
選定においては、必要なトルク、回転速度、制御精度、
動作環境、電源条件、コストを総合的に考慮することが重要です。
適切なサーボモーターの選定により、
機械の性能を最大限に引き出し、
効率的で信頼性の高いシステムを構築することが可能になります。
















コメント