工作機械やロボット、自動搬送装置など、
高い精度と安定した動きが求められる場面で使われる「サーボモーター」。
でも、初心者の方からはよくこんな質問をいただきます。
「普通のモーターと何が違うの?」
「なぜそんなに精密な動きができるの?」
「フィードバック制御って何?」
この記事では、サーボモーターが精密な動作制御を可能にする理由を、
初めての方でも理解できるように、わかりやすく解説します。
サーボモーターとは?簡単にいうと…
サーボモーターは、「目標とする位置・速度・角度にピタッと合わせることができる」
高精度なモーターです。
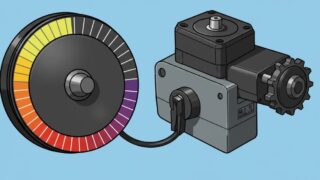
内部に位置検出装置(エンコーダー)を内蔵しており、
「今どこにいるか」「どれだけ回ったか」を常に把握しながら動きます。
精密な制御ができる理由:フィードバック制御とは?
~サーボモーターが“ピタッと動く”しくみ~
産業用ロボットや工作機械など、
わずかなズレも許されない場面で使われるサーボモーター。
その最大の特長が「フィードバック制御」です。
本項では、
「なぜフィードバック制御によって精密な動きができるのか?」
をやさしく解説します。
そもそもフィードバック制御とは?
フィードバック制御とは、簡単に言うと…
「今の状態を見ながら、ズレていればすぐに修正する」という賢い制御方法です。
サーボモーターは、指令された動きと実際の動きにズレがないかを常に監視し、
そのズレを自動で修正しながら動いています。
フィードバック制御の流れ
- コントローラが指令を出す
→「○○mm動いて!」「○○°まで回して!」など。 - モーターが動き始める
- エンコーダーが現在の位置を検出
→ 回転量や現在位置を常に測定しています。 - ズレを検出すると自動で修正
→ 指令と違っていたら、すぐに補正して正しい位置に戻します。
たとえばこんな動き方
| 状況 | 動き |
|---|---|
| 指令より回りすぎた | モーターが戻って調整 |
| 回転が遅れている | 出力を上げて追いつく |
| 想定外の負荷がかかった | 自動でパワーを調整して対応 |
このズレ→補正→ズレ→補正のサイクルが、
1秒間に何千回も繰り返されているのです。
そのおかげで、サーボモーターは…
正確な位置に止まれる
高速でも安定して動ける
外部からの影響にも対応できる
という、非常に高精度な動作が可能になります。
なぜこれが重要なの?
モーターは単純に「回るだけ」なら簡単です。
しかし、「正確に止める」「ズレずに動かす」
ことはとても難しいのです。
もしフィードバック制御がなければ…
モーターは指令通りに動いているか確認できない
ズレても気づかないまま進み続けてしまう
外乱(たとえば重さの変化や風)に弱い
といった問題が起きます。
フィードバック制御は“自動で帳尻を合わせる”仕組み
初心者の方にイメージしていただきやすいように、
人の動作で例えるとこんな感じです。
フィードバック制御の例:車のハンドル操作
→ これを無意識に何度も繰り返しているのが人の運転です。
サーボモーターもまったく同じで、
「ズレたら自分で修正し続ける」ことで、まっすぐ・正確に進めるのです。
サーボが精密な理由=ズレを見て直すから
| 項目 | 内容 |
|---|---|
| 制御方式 | フィードバック制御 |
| 構成 | 指令 → 実測 → 比較 → 補正 |
| 働き | ズレを自動で修正し続ける |
| 結果 | 精密で安定した動きが可能になる |
サーボモーターが他のモーターと違うのは、
動いた結果を「見る目(エンコーダー)」を持っていて、
自分で軌道修正ができるという点です。
これが、サーボモーターが高精度な位置制御・速度制御を
実現できる最大の理由なのです。
他のモーターとの違い
~サーボモーターは“ズレを直せるかしこいモーター”~
機械設計を始めたばかりの方が悩みやすいポイントのひとつが、
「モーターの使い分け」です。
とくに「サーボモーターって何がそんなにすごいの?」
という疑問はとても多く寄せられます。
この記事では、サーボモーターと他の代表的なモーターとの違いを、
初心者にもわかりやすく紹介します。
各モーターの特徴と制御方式
| モーターの種類 | 特長 | 制御方式 |
|---|---|---|
| サーボモーター | 高精度、ズレを自動修正 | フィードバック制御 |
| ステッピングモーター | 指令通りに動くが、ズレ検出はなし | オープンループ制御 |
| DC/ACモーター | 単純な回転動作。制御はアバウト | オープンループ制御 |
サーボモーター:ズレを自分で直すかしこいモーター
サーボモーターは、
「フィードバック制御」という仕組みで動いています。
内部のセンサー(エンコーダー)で常に自分の状態を確認し、
「指令どおりに動いているか?」をチェック。
もしズレがあれば、その場で自動修正します。
たとえば…
というように、ズレに気づいて自分で調整する力を持っているのです。
ステッピングモーター:指令どおりに動くだけ
ステッピングモーターは、「パルス信号の数=回転角度」となっており、
コントローラの指令通りに細かくステップして動きます。
ただし、現在位置の確認はできません。つまり…
- ズレがあっても検出できない
- 外部からの力で動かされてもわからない
- 負荷が重すぎると脱調(制御不能)になることも
という弱点があります。
精度があまり求められない用途では使いやすいですが、
高精度な制御には不向きです。
DCモーター・ACモーター:単純な回転動作
DCモーターやACモーターは、電圧をかけるだけで回転するシンプルな構造です。
装置の「ファン」や「ポンプ」など、
回りさえすればOKな用途では活躍します。
サーボモーターは“見て動ける”から高精度
サーボモーターの強みを一言でいうならば、
「自分の動きを常に監視して、ズレたら自分で直す」かしこいモーター
| 特徴 | DC/ACモーター | ステッピングモーター | サーボモーター |
|---|---|---|---|
| 精度 | × | △(ズレ検出なし) | ◎(ズレ自動補正) |
| 制御 | 回転のみ | 回転制御 (開ループ) | 位置・速度・トルク制御 (閉ループ) |
| 負荷変動対応 | 弱い | やや弱い | 強い |
設計初心者へのアドバイス
「どのモーターを使うべきか?」と迷ったら、
まずは次の視点で考えてみましょう。
モーター選びは、装置の精度・コスト・負荷条件に
応じて適材適所が大切です。
サーボモーターが活躍する場面
サーボモーターは、次のような用途でよく使われます。
精密な位置決めや、動作の安定性が
求められる場面でサーボモーターは非常に有効です。
設計で注意すべきポイント
サーボモーターを設計に取り入れる際は、以下の点に注意しましょう。
トルクと慣性負荷のマッチング
動かす対象が重すぎると、モーターが過負荷になります。
→ 慣性比の計算が重要!
ケーブルの取り回しとノイズ対策
位置情報のフィードバックには、ノイズに強い信号線が必要です。
→ シールドケーブルやアース処理が推奨されます。
サーボアンプとの組み合わせ
モーター単体では動かず、サーボアンプとセットで使用します。
→ 電圧や指令方式の整合性を確認。
サーボの導入は「精度」と「安定性」を手に入れること
設計初心者の方が機構を考えるとき、
つい「大きなトルクのモーターをつけておけば何とかなる」と思いがちですが…
ただ回るだけのモーターでは
「意図した場所にピッタリ止まる」は実現できません。
サーボモーターなら…
といった精密な動作制御が可能になります。
まとめ:サーボモーターは“自分で考えて動くモーター”
| 項目 | 内容 |
|---|---|
| 特長 | 位置・速度・トルクを高精度に制御 |
| 原理 | フィードバック制御によりズレを補正 |
| 比較 | ステッピングやDCモーターより高性能 |
| 注意点 | トルク選定・ノイズ対策・アンプ整合が必要 |
「なぜサーボモーターが精密に動けるのか?」という疑問の答えは、
フィードバック制御による自動補正機能にあるということです。
















コメント