ステッピングモーターは、正確な角度で回転する特性を持つモーターで、
機械設計において精密な位置制御が必要な場面でよく使用されます。
本記事では、ステッピングモーターの特性と
選定ポイントについて詳しく解説します。
ステッピングモーターの特性
ステッピングモーターの構造
ステッピングモーターは、内部にステータとローターがあり、
ステータに巻かれた複数のコイルが交互に通電されることで、
ローターが一定の角度で「ステップ」して回転します。
この動作により、制御信号に応じた正確な位置制御が可能です。
ステッピングモーターの動作原理
ステッピングモーターは、制御信号のパルスごとに
一定角度で回転するという特性を持ちます。
このため、1回のパルスでモーターが
どれだけ回転するか(ステップ角)が決まっています。
全ステップ数(1回転あたりのステップ数)が増えるほど、
1回のステップでの回転角が小さくなり、
より細かい制御が可能になります。
ステッピングモーターの種類
ステッピングモーターには主に3つのタイプがあります。
- バイポーラステッピングモーター
- 簡単な制御で高トルクを発生できるため、
多くの用途で使われています。
- 簡単な制御で高トルクを発生できるため、
- ユニポーラステッピングモーター
- バイポーラよりも制御が簡単であり、
コイルの巻き方が異なり電流を流す方向を一方向にするため、
比較的シンプルな回路で動作しますが、
トルクはバイポーラに劣ります。
- バイポーラよりも制御が簡単であり、
- ハイブリッドステッピングモーター
- バイポーラとユニポーラの特性を組み合わせたもので、
高トルクかつ高精度の位置決めが可能です。 - 工業用機器などで多く使われています。
- バイポーラとユニポーラの特性を組み合わせたもので、
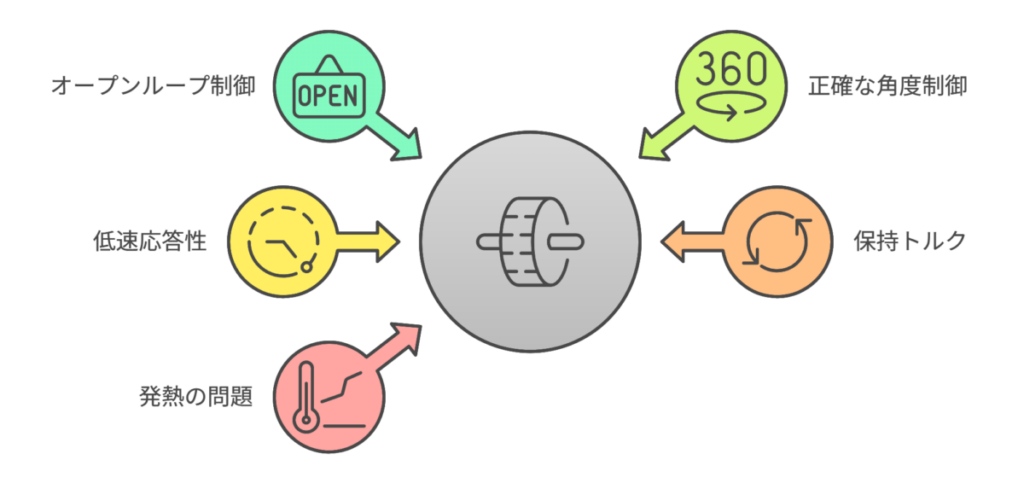
ステッピングモーターの特性
オープンループ制御
ステッピングモーターは、一般的にオープンループ制御で使用されます。
これは、フィードバック機構を持たずに
目標の位置に到達することを前提にした制御です。
フィードバック機構がないため、コストが低くなりますが、
負荷変動や過負荷時にステップが抜ける可能性があります。
正確な角度制御
ステッピングモーターは、一定角度ごとにステップして
回転するため、正確な位置決めが可能です。
エンコーダやセンサーを使用しなくても、
指令したステップ数に応じた位置に正確に移動します。
高速応答性は低い
ステッピングモーターは、高速で回転すると
トルクが減少するため、あまり高速動作には適していません。
中低速での動作が求められる用途に向いています。
保持トルク
電流を通したままモーターが停止した状態でも、
ローターは位置を維持します。
このため、停止中でも位置保持が
求められるアプリケーションで効果を発揮します。
発熱の問題
ステッピングモーターは、通電し続けることで発熱する傾向があります。
発熱を抑えるために、適切な冷却が必要になる場合があります。
ステッピングモーターの選定ポイント
必要なトルク
ステッピングモーターのトルクは、負荷を考慮して選定します。
動作中のトルクだけでなく、停止中の位置保持が必要な場合は、
モーターの保持トルクも重要です。
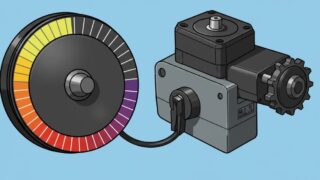
ステップ角の選定
ステッピングモーターのステップ角は、
モーターが1回のパルスで回転する角度を示します。
一般的には1.8度や0.72度のモーターが多く使用されています。
ステップ角が小さいほど、精密な位置制御が可能です。
速度
ステッピングモーターは、中低速での動作に適しています。
高速動作が必要な場合、ステッピングモーターではなく
サーボモーターなどの他のモーターを選択する方が良い場合もあります。
高速回転時のトルク低下
ステッピングモーターは高速で回転するとトルクが低下するため、
速度とトルクのバランスを考慮して選定する必要があります。
動作環境
モーターが使用される環境条件も重要です。
温度や湿度、振動、塵埃の多い環境では、
耐環境性能が高いモーターを選定することが重要です。
また、発熱が問題となる場合には、冷却機構を検討する必要があります。
制御方法
ステッピングモーターの制御には、専用のドライバが必要です。
モーターを選定する際には、
ドライバとの互換性や使用する制御方式も考慮する必要があります。
コストと効率
ステッピングモーターは比較的低コストであり、
オープンループ制御によるシンプルなシステム構築が可能です。
ただし、使用するアプリケーションに応じて、
サーボモーターなど他の選択肢と比較する必要があります。
ステッピングモーターのステップ角と位置制御
~一歩ずつ正確に動くモーターの仕組み~
ステッピングモーターは、
電気信号を送るたびに一定の角度だけ回転するモーターです。
1ステップごとに「カチッ」と動くため、
位置を数えるだけで正確な回転角度を把握できます。
ステップ角とは?
ステップ角とは、「1ステップで回転する角度」のことです。
例えば…
数値が小さいほど細かく・なめらかに動きますが、
1回転するのに必要なステップ数が増えます。
位置制御の仕組み
ステッピングモーターの位置制御は、とてもシンプルです。
- 目標ステップ数を決める
- 例:「90°回したい」
→ ステップ角1.8°の場合、90 ÷ 1.8 = 50ステップ
- 例:「90°回したい」
- ステップ信号を送る
- ドライバが50回パルス信号を送ると、
モーターはその分だけ動きます。
- ドライバが50回パルス信号を送ると、
- 位置が決まる
- 基本的にはセンサーなしでも、
送ったパルス数=回転角度として位置を決定できます。
- 基本的にはセンサーなしでも、
メリットと注意点
メリット
注意点
負荷や加減速を考慮した設計が、精度維持のポイント
ステップ角は1ステップで動く角度で、小さいほど高精度な動きが可能
ステッピングモーターはパルス数=位置というオープンループ制御が基本
主なメーカー
オリエンタルモーター株式会社 メーカーページはこちら
まとめ
ステッピングモーターは、正確な位置制御が求められる
機械設計において非常に有用です。
選定時には、トルク、ステップ角、速度、動作環境、
制御方法、コストといった要素を総合的に検討する必要があります。
中低速で精密な位置制御が必要な場合や、
オープンループ制御で十分な用途において、
ステッピングモーターは最適な選択肢となるでしょう。















コメント